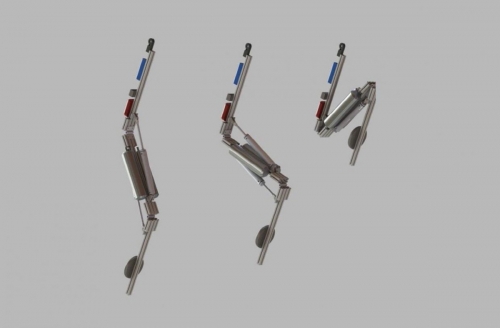
23일(현지시간) 미국 IT매체 더버지는 디즈니리서치가 공중에서 회전할 수 있는 곡예 로봇 ‘스틱맨’을 선보였다고 보도했다. 스틱맨은 두 개의 관절로 3등분 된 막대형 로봇으로 사람이 팔을 위로 뻗은 것과 비슷한 7피트(약 213㎝) 크기이다.
스틱맨은 지상 6m 높이의 공중그네에서 뛰어내리며 뒤로 회전한 후 바닥에 착지할 수 있다. 마치 사람이 다리를 굽히고 턱을 아래로 당겨 몸을 접는 모습과 같다. 디즈니는 스틱맨 개발에 대한 논문에서 “인간은 수천 년 동안 체조 예술을 연습하며 인상적인 곡예 기법을 개발했다”면서 “로봇은 이동성과 자율성을 갖추기 시작했으며 극적이고 유익한 방법으로 이러한 움직임을 모방할 수 있다”고 밝혔다.
스틱맨은 센서를 통해 위치를 파악하고 움직임을 결정한다. 디즈니는 “로봇은 관성측정장치(IMU)와 레이저 장치를 사용해 비행 중 상태를 추정하고 공중그네 진자운동의 안팎에서 움직임을 변화시킨다”고 설명했다. 논문에 따르면 스틱맨에 내장된 레이저 거리 측정기와 6축의 IMU가 공중에서 위치와 자세를 계산한다. 이를 토대로 몸체의 세 부분과 2개 관절의 움직임을 조정해 회전·비행 속도를 조절한다. 알고리즘을 추가하면 회전 수를 늘리거나 자유낙하 등 다양한 스턴트 연기를 선보일 수 있다. 연구팀은 더 복잡한 동작을 수행하기 위해 실험을 계속할 것이라고 밝혔다.
디즈니리서치는 디즈니 애니메이션 제작을 위한 연구 목적으로 만들어졌다. 디즈니는 10여 년 전부터 가상현실과 로봇 등 신기술의 잠재력을 탐구하기 위한 팀을 구성했다. 이번에 개발한 로봇 기술은 스턴트맨을 대신하거나 컴퓨터그래픽(CG) 작업을 위한 모션캡쳐 등에 사용될 것으로 보인다. 디즈니의 테마파크에서 활용할 가능성도 있다. 다만 디즈니 측은 구체적인 계획을 언급하지는 않았다.
지상에서 곡예를 선보이는 로봇은 스틱맨 이전에도 공개됐다. 지난해 보스턴다이나믹스는 1.5m 크기의 휴머노이드 로봇이 블록 사이를 뛰어넘고 지상에서 공중 뒤돌기 동작을 할 수 있게 하는 데 성공했다. 첨단 기술의 위험에 대해 경고해온 엘론 머스크 테슬라 최고경영자(CEO)는 당시 트위터에 “몇 년 후에는 로봇이 너무 빠르게 움직여 초고속 촬영 장비가 필요해질 것”이라고 밝혔다. 더버지는 아직은 아니지만 도시와 자연의 장애물을 빠르게 뛰어넘는 파쿠르, 체조를 할 수 있는 로봇은 현실이 되고 있다고 설명했다.
![부동산 PF 체질 개선 나선다…PF 자기자본비율 상향·사업성 평가 강화 [종합]](https://img.etoday.co.kr/crop/140/88/2101720.jpg)
![‘2025 수능 수험표’ 들고 어디 갈까?…수험생 할인 총정리 [그래픽 스토리]](https://img.etoday.co.kr/crop/140/88/2102319.jpg)
![전기차 수준 더 높아졌다…상품성으로 캐즘 정면돌파 [2024 스마트EV]](https://img.etoday.co.kr/crop/140/88/2102282.jpg)
![낮은 금리로 보증금과 월세 대출, '청년전용 보증부월세대출' [십분청년백서]](https://img.etoday.co.kr/crop/140/88/2102283.jpg)
![[종합] ‘공직선거법 위반’ 김혜경 벌금 150만원…法 “공정성·투명성 해할 위험”](https://img.etoday.co.kr/crop/140/88/2102280.jpg)
![이혼에 안타까운 사망까지...올해도 연예계 뒤흔든 '11월 괴담' [이슈크래커]](https://img.etoday.co.kr/crop/140/88/2101314.jpg)
!["늦었다고 생각할 때가 제일 빠를 때죠" 83세 임태수 할머니의 수능 도전 [포토로그]](https://img.etoday.co.kr/crop/140/88/2101767.jpg)










![[아시아증시] 트럼프 대중 강경파 발탁에 하락…상하이 1.73%↓](https://img.etoday.co.kr/crop/85/60/2102373.jpg)
![[종합] 데이브 민 연방 하원의원 첫 당선…한국계 연방의원 당선 4명으로](https://img.etoday.co.kr/crop/85/60/2102066.jpg)


![‘2025 수능 수험표’ 들고 어디 갈까?…수험생 할인 총정리 [그래픽 스토리]](https://img.etoday.co.kr/crop/300/170/2102319.jpg)
!['수능 끝, 홀가분해요' [포토]](https://img.etoday.co.kr/crop/300/190/2102419.jpg)